

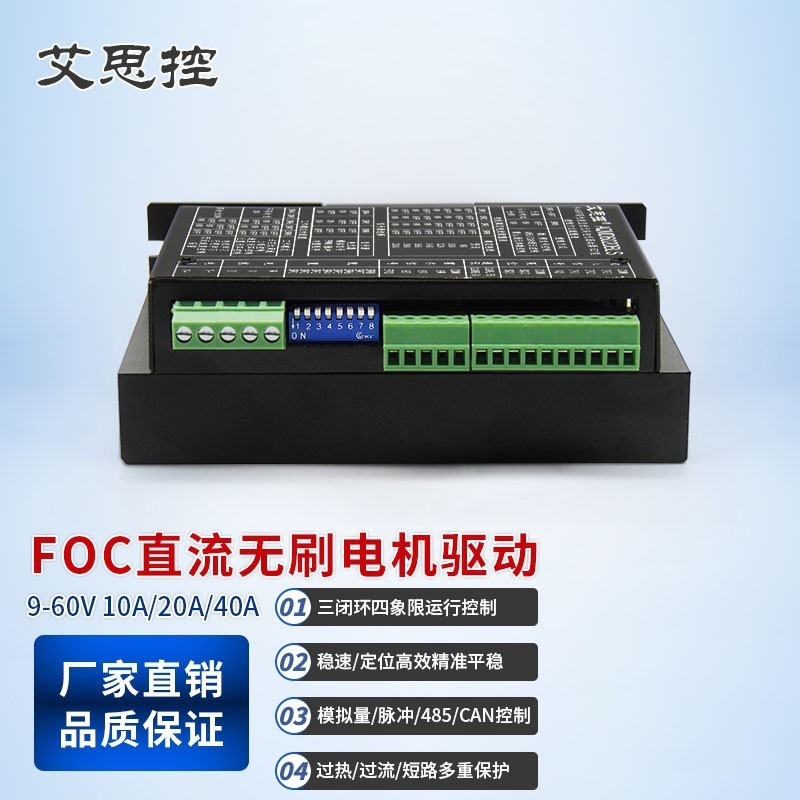






AQMD_BLS-ExF系列电机驱动器功能特点
| ◆电压范围9~60V,额定电流10A/16A/25A/35A,最大电流20A/35A/40A/50A; |
| ◆电位器、0-3.3/5/10V模拟信号、0/3.3/5/12/24V逻辑电平、开关量、PWM、频率、脉冲、RS485/ CAN多种输入信号; |
| ◆占空比调速、转矩控制(稳流)、速度闭环控制(稳速)、位置闭环控制(角度/距离控制)多种调速方式; |
| ◆支持方波与正弦波驱动方式自由切换,兼顾方波驱动方式的响应实时性与正弦波驱动方式的低噪声特性; |
| ◆支持加减速缓冲时间与加减速加速度控制,可在指定行程内自动加减速并精确定位; |
| ◆电机电流PID调节,最大启动/负载电流、制动(刹车)电流可分别配置;电机过载/堵转限流停转,以及瞬间大电流监测,防止过流损坏电机或驱动器; |
| ◆支持驱动器内部温度监测,可配置过热保护温度; |
| ◆支持驱动器电源电压内部监测,可配置过压/欠压关断监测值; |
| ◆支持倍流输出,启动、大负载时可大力矩输出; |
| ◆支持电机转速测量,电机堵转检测;支持外接限位开关限位和堵转限位; |
| ◆485/CAN通讯隔离或共模电压保护;支持485/CAN多站点通讯,方便多种控制器(如单片机、PC机或PLC)控制,支持通讯中断停转保护; |
| ◆极小的PWM死区,仅0.5us,PWM有效范围0.1%~100%;18kHz/20kHz的PWM频率,电机调速无PWM嚣叫声; |
| ◆信号接口过压保护,信号接口至高可承受25V电压; |
| ◆接口ESD防护,可适应复杂的现场环境; |
| ◆使用ARM Cortex-M3/M4处理器。 |


注:本驱动器适合于直流有感无刷电机
AQMD_BLS-ExF系列驱动器参数对比
项目AQMD6010BLS
-E2F(9-60V 10A款)AQMD6020BLS
-E2F/E3F(9-60V 20A款)AQMD6030BLS
-E2F/E3F(9-60V 25A款)AQMD6040BLS
-E2F(9-60V 35A款)
| 控制信号类型 | 电位器、模拟量、PWM、频率、脉冲、电平、开关量、485/CAN通讯控制 | |||
| 电机控制方式 | 占空比(开环)调速、速度闭环、位置闭环、限力矩控制 | |||
| 位置控制制动方式 | 恒加速度制动,定位更精准平稳 | |||
| 电源电压范围 | 9~60V | |||
| 额定电流 (可长时间堵转电流) |
10A | 16A | 25A | 35A |
| 最大输出电流 | 20A(倍流)/ 12A(长时间) |
35A(倍流)/ 20A(非倍流) |
40A(倍流)/ 30A(长时间) |
50A(倍流)/ 40A(长时间) |
| 支持电机转速 |
方波:0~100000RPM |
0~20000RPM | ||
| 倍流输出 | 支持 | 支持 | 支持 | 支持 |
| 过载限流 | 支持 | 支持 | 支持 | 支持 |
| 堵转停机 | 支持 | 支持 | 支持 | 支持 |
| 异常大电流关断 | 支持 | 支持 | 支持 | 支持 |
| 内部温度测量/ 过热限流/关断 |
支持 | 支持 | 支持 | 支持 |
| 电源电压测量/ 过压/欠压关断 |
支持 | 支持 | 支持 | 支持 |
| 外形尺寸 | 136×82×45mm | 136×82×45mm | 136×82×45mm | 178×109×68mm |
| 工作环境温度 | -30C°~70C° | |||
| 通讯接口保护 | ESD、E2F系列485/CAN隔离、E3F系列485/CAN共模电压保护 | |||
产品特色
●电机相序自动适配
电机的三相线和三霍尔信号线可不按顺序与驱动器连接,只需拨码开关第4、5位拨到ON启用电机相序自动学习,对电机霍尔顺序进行学习。通过对电机6次换向控制后学习即完成,电机方可正常驱动。

●兼容多种控制信号和多种控制方式
支持电位器、模拟量、PWM/频率/脉冲、485/CAN多种控制信号,支持电机开环调速、闭环调速、位置控制、力矩控制多种工作模式。

● 方波/正弦波驱动方式自由切换
驱动器正弦波驱动方式(SVPWM输出方式)使用场定向矢量控制(FOC)算法,具有电机输出力矩脉动小、噪声小的特点,驱动器开环调速、闭环调速和位置控制均支持FOC方式,并支持方波驱动方式与FOC方式自由切换。

●可大力矩启动 安全超载
支持倍流输出,从而实现至多2倍额定力矩启动和2倍额定力矩超载运行;可设定倍流时间,防止电机长时间超载运行而损坏;同时,驱动器对内部温度实时监控,当温度达到设定值时,禁用倍流或关断输出,从而保护驱动器。
超载/越障能力比较

●极低速稳速刚性强
驱动器时间-位置闭环调速算法可使电机在低速运行时刚性强,低至60RPM转速也可大力矩闭环调速控制。

●高速定位精准平稳
驱动器先进的位置控制算法可根据给定的加速度和最大速度按照牛顿运动定律控制电机在高速运行情况下也能精准平稳定位。

●四象限运行控制
可控制电机产生与电机转动方向相反的转矩并进行加速度控制,从而无论水平或竖直运动,闭环调速和位置控制均能可靠控制。

●自定义过程控制
对于常规的运动过程控制,可通过一段自定义过程脚本实现运动过程逻辑控制,从而省掉PLC这样的逻辑控制器。

●多重保护安全可靠
电压、电流、温度实时监控,过热、过流、堵转、静电、短路保护多重保护,驱动器工作更稳定可靠。

产品应用

位置控制方案对比

注:配常规减速机后本驱动器可实现1mm或1度精度的定位控制。
驱动方式性能对比

注:
1) 仅方波/正弦波兼容款(-E2F系列)支持FOC;
2) 为了电机运行平稳转矩脉动小,建议换向频率2000Hz(两个极电机20000RPM,四个极电机10000RPM,八个极电机5000RPM)以下才使用FOC方式。
3) 若应用于位置控制,为了定位更准,在速度或加速度较大时(如:分别2000Hz和3000Hz/s以上),建议使用方波驱动方式。
4) 方波/正弦波兼容款(-E2F系列)与标准款(-E2系列)开环调速和速度闭环工作模式的方波输出方式不同,-E2系列减速更平缓;位置闭环工作模式两者方波输出方式一致。
技术参数

接口定义

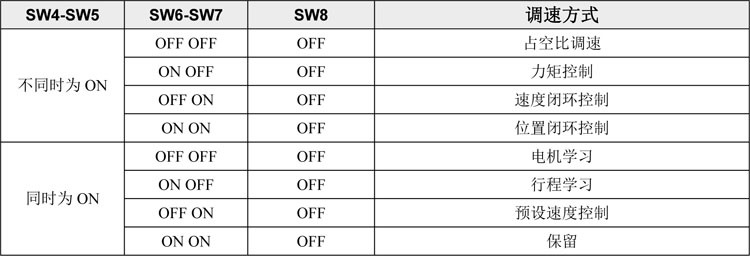
拨码开关配置
1.控制方式配置

2.信号源选择

3.工作模式配置
典型用法
1.单电位器占空比/闭环调速点动控制的接法

点动控制方式使用电位器调速的工作过程为:按下B1,电机正转,使用电位器调速;B1弹起,电机停止;当正转限位后电机停止,再按B1无效;按下B2,电机反转,使用电位器调速;B2弹起,电机停止;当反转限位时电机停止,再按B2无效。
2.双电位器占空比/闭环调速方式接法

此接法的双电位器可以分为独立控制和协同控制,当为独立控制时对电机正反转分别调速,通过开关控制电机使能和切换电机转动方向,通过限位开关对正反转限位;档位协同控制时,设电位器2的电压为参考电压,调节IN1和IN2的电压,用于电机调节速度和方向。
3.单片机PWM信号占空比/闭环调速方式接法

此接法的工作过程为:单片机的电源地接驱动模块的COM口;IN1脚接单片机的PWM的输出,用于调速;IN2和IN3与单片机的两个IO相连,控制电机正反转及紧急制动。
4.单片机脉冲信号位置控制的接法

此接法的工作过程为:单片机的电源地接驱动模块的COM口;IN1与单片机的IO1相连,来确定脉冲的个数,用于电机位置控制;VO与单片机的IO0相连,用于完成信号控制;IN2和IN3与单片机的两个IO相连,控制电机正反转及紧急制动。
注:VO输出为3.3V逻辑电平,若单片机不接受3.3V逻辑电平,需要将其转为5V逻辑电平。
5.PLC模拟信号占空比/闭环调速的接法

此接法的工作过程为:IN1与PLC的AO端口连接,用于调速;IN2与PLC的Y2,控制电机方向;IN3与PLC的Y1连接,控制电机启停。
6.PLC脉冲信号位置控制的接法

此接法的工作过程为:IN1与PLC的Y3相连,来确定脉冲的个数,用于电机位置控制;IN2和IN3与单片机的两个IO相连,控制电机方向及紧急制动;VO串联240Ω的电阻后与COM间接一光耦,光耦输出接PLC的+24V与X1,用于将完成信号反馈给PLC。
7.485多站点控制的接法

每台驱动器的485通讯线按A-A、B-B的方式并联后跟一台485主站相连,485主站通过驱动器配置的从站地址来对每台驱动器独立操作。每一个驱动器配置的地址应唯一,不能与其它驱动器重复。
8.CAN多节点控制的接法

每台驱动器的CAN通讯线按CANH-CANH、CANL-CANL的方式并联后与CAN客户端相连,在CAN总线上至少并联一个120Ω的电阻,CAN客户端通过驱动器配置的节点ID来对每台驱动器独立操作。每一个驱动器配置的节点ID应唯一,不能与其它驱动器重复。
示例程序
提供PC机示例程序,可用来配置参数、调试电机或二次开发。

- 软件使用手册下载地址:http://www.akelc.com/download/show_74.html
AQMD6010BLS-E2资料下载地址:http://www.akelc.com/download/show_170.html
AQMD6020BLS-E2资料下载地址:http://www.akelc.com/download/show_171.html
生产工艺
产品由多家优质加工厂生产,品质保证,供应充沛;一流的设备,严谨的生产线,精良的焊接工艺。

质量把控
驱动器产品量产前均会进行-40℃~85℃高低温运行试验,额定电流长时间运行负载能力与温升试验,以及电磁兼容试验(使用同系列代表款驱动器进行CE认证)等试验;每一台产品出货前将使用机检方式进行全检,并记录产品的各项检验数据,确保到达客户手中的每一台产品均为合格产品。






附:AQMD_BLS系列驱动器选型参考
